外围switch芯片对接和使用手册
目录
1 介绍
- 适用人员
本项目适用于有基础C语言开发知识的人员。
- 开发与测试环境
参考快速入门
- 简介
GMAC是SF19A2890芯片中的一个模块,属于数据链路层,GMAC外部可以对接PHY芯片和SWITCH芯片。其中PHY芯片属于物理层,SWITCH芯片通常包含多个PHY可以用于收发数据包。GMAC和PHY/SWITCH芯片一起构成了SF19A2890的以太网部分。
- vlan简介
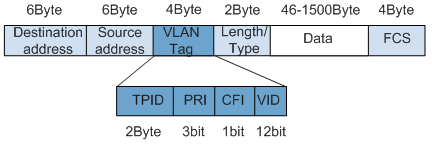
vlan全称为虚拟局域网,虚拟局域网是一组逻辑上的设备和用户,这里用来区分WAN和LAN。如下图所示,对应数据包会打上vlan tag,vlan id表示该数据包所属vlan的编号,WAN和LAN采用不同的vlan id。
- switch与gmac工作介绍
如下图所示,在当前SF19A28909090909090909090中,只有GMAC网卡被注册为eth0,为了实现WAN-LAN的功能,在eth0的基础上划分了eth0.1和eth0.2两个虚拟网卡分别做为LAN和WAN。当接收时,GMAC收到带有vlan头的数据包并上送,系统会根据数据包中不同的vlan id区分LAN和WAN,vlan 1的数据包会剥除vlan头送到LAN,vlan 2的数据包会剥除vlan头送到WAN。当发送时,系统发送的普通数据包在经过虚拟网卡eth0.1和eth0.2后也会带上vlan tag,发送到switch的cpu port。
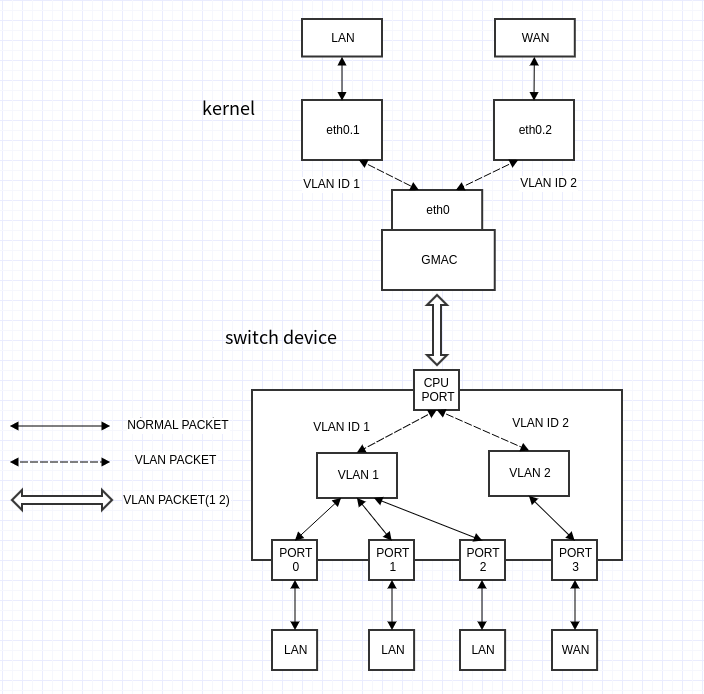
因此,switch的配置也需要与虚拟网卡划分相对应,配置vlan和端口绑定,这样当输入时不同端口的输入数据会打上对应的vlan tag,系统就可以区分WAN和LAN。输出时对应端口会剥除vlan tag,从而可以实现正常的WAN-LAN通信。
2 项目引用
- network配置可以参考以太网wan-lan划分指南
3 开发详情
3.1 对接准备
1、mdio读写
通过gmac的mdio接口既可以读写通用phy中的寄存器,也可以读写switch中的寄存器。其中不同的switch芯片有不同的mdio读写方式,查看待对接switch的说明书可以新增该switch中寄存器的mdio读写方法。使用mdio读写时,需要确定phy addr。phy addr一般通过scan的方式在0~31的范围进行查找,也可以按实际硬件情况在dts中指定,具体查看linux dts说明文档。
2、rgmii的clock检查是否正常
当出现mdio读写不通时,可以使用示波器测量gmac和phy/switch之间的时钟是否正常。TODO:TX/RX CLOCK详细描述
3、设置gmac接口模式
可以根据switch芯片的cpu port的规格切换gmac RGMII的工作模式,gmac可以工作在10M、100M、1000M的全双工/半双工。
4、switch的reset
使用switch之前可以对switch进行硬件reset,可以防止未知错误。switch硬件复位的过程中会导致提供给gmac的时钟不正常,所以在配置完硬件reset之后需要设置一定时间的delay等待switch硬件复位完成。
注意: reset_gpio默认为0xb即gpio11,新的硬件版型需要对此gpio做确认。
- 如果硬件上没有修改,则保持默认值
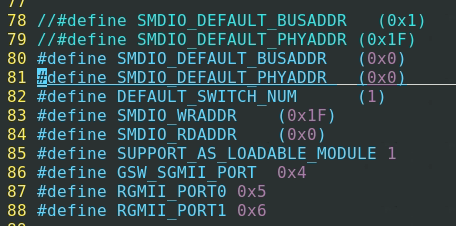
- 如果硬件上次脚位有改动,请在uboot中修改 执行
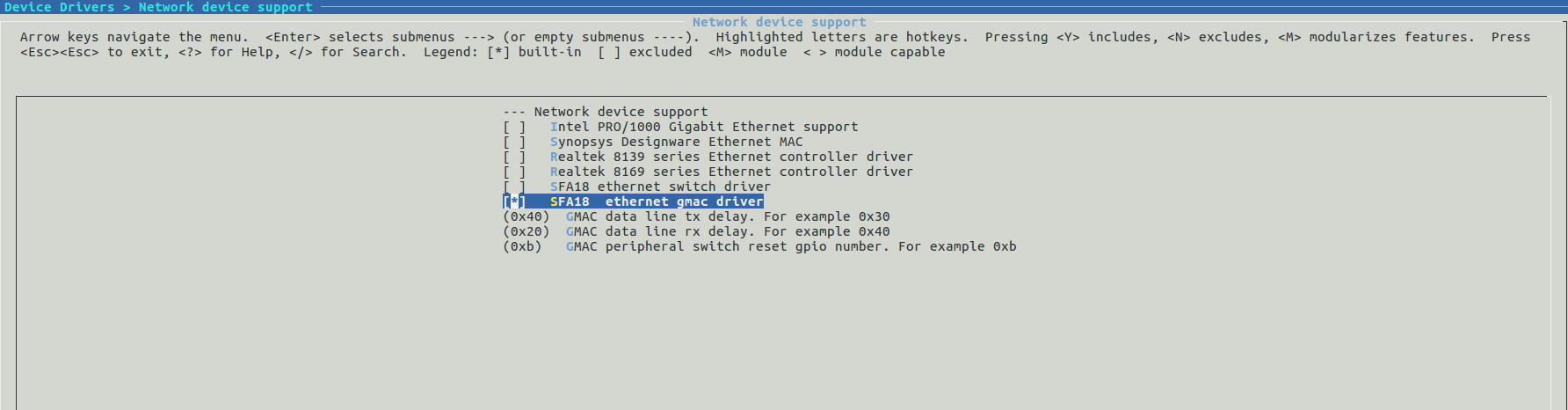
make menuconfig,修改下图对应的switch reset gpio值,保存后覆盖configs/下默认的版型配置文件即可
5、switch的初始化
根据switch芯片说明书的要求对该switch进行初始化的寄存器配置,一般为设置cpu port为1000M全双工即可(需要与gmac工作在同一模式),switch的初始化在irom、uboot、linux中都需要进行。
以intel switch为例,根据文档描述,intel switch的cpu port启动后会自动设置为1000M全双工。因此,如果gmac为1000M全双工模式,intel switch无需初始化。当使用的其他型号switch的cpu port不为1000M全双工时,则需要在switch初始化中配置1000M全双工。

6、phy的初始化
phy的初始化由内核完成,主要包括两个内核提供的函数,of_mdiobus_register和of_phy_connect。通过函数of_mdiobus_register将mdio的读写函数提供给内核,内核通过scan的方式获取phy addr。在of_phy_connect中内核获取phy id并注册对应的phy device,同时设置gmac和phy的接口模式。
7、调整tx/rx delay
当数据不通时通过ping和抓包的方式查看是tx不通还是rx不通,并且可以调整对应的tx/rx delay,使用devmem命令调试gmac芯片中预留的tx/rx delay寄存器,当数据流通了之后,对应的tx/rx delay设置的值应该在irom/uboot/linux中都进行配置。
devmem 0x19e04444 //读取tx delay的当前值
devmem 0x19e04448 //读取rx delay的当前值
devmem 0x19e04444 32 0x30 //设置tx delay = 0x30 * 0.04ns
devmem 0x19e04448 32 0x40 //设置rx delay = 0x40 * 0.04ns
//tx rx delay的设置范围为1~256
tx/rx delay在uboot中配置 当通过devmem命令调整好delay值后,在uboot中将该值写到configs/目录下对应的版型文件中
如configs/sfa28_fullmask_ac28_defconfig
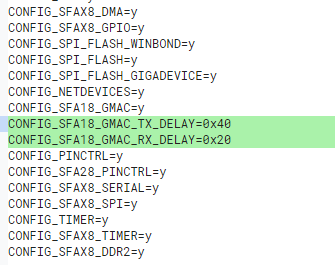
也可以通过make menuconfig进行配置,然后保存到configs/目录下对应的版型文件
tx/rx delay在linux中配置 当通过devmem命令调整好delay值后,在linux中将该值写到对应的版型的dts文件
如linux-4.14.90/arch/mips/boot/dts/siflower/sf19a28_fullmask_ac28.dts,前一个代表TX delay,后一个代表RX delay
设置示例:
如果switch中有调整switch cpu port的tx/rx delay的方法,也可以调整switch芯片中的tx/rx delay来调通数据流。
3.2 irom对接
目前的irom代码可以支持通用phy,realtek和intel两种switch的型号(通过更换patch的内容进行支持),当没有patch数据时默认支持realtek switch。irom中对接switch主要包括switch的初始化以及检查端口连接状态,由于irom中的代码是不可修改的,所以对接新的switch主要通过修改patch文件完成,irom的gmac代码位于irom/gmac目录下。
- patch简介
patch数据存放在txt文件中,编译uboot时放入对应位置,patch文件位于uboot目录的如下位置:
uboot/board/siflower/sfax8_common/irom_patch_default.txt
每一条patch数据包括7个16进制数,patch的起始物理地址为0x6fe4,一条patch的长度为28。添加一条patch需要在上一条的起始地址加上28,然后写入相应的patch数据。例如第一条数据地址为0x6fe4,则第二条的地址为0x7000(0x7000-0x6fe4=28)。第x条数据的地址即为(0x6fe4+28*(x-1))。patch数据的地址最大不能超过0x8000(32k)。
txt文件中每一行放置7个16进制数对应一条patch,用空格隔开
2 1 3 5 0 0 7d0 //第一条数据起始地址0x6fe4
60 10 1 1f 7038 78dc 78c0 //第二条数据起始地址0x7000
irom中gmac模块通过函数get_data_from_spl来读取patch文件中的数据,初始化以及连接函数中会循环读取patch中的数据,进行对应的mdio操作,从而支持不同类型的switch。
- patch使用说明
1、 通过uboot使用patch
irom_patch_default.txt中的数据会在编译uboot时,由代码checksum将其存放在uboot镜像中的对应位置,checksum.c代码位置如下,同目录下的checksum为checksum.c gcc编译生成。
uboot/bare_spl/tools/checksum.c
因此,如果需要改变patch来调试irom中的代码,只需要修改uboot中irom_patch_default.txt,编译uboot镜像并烧录即可。
2、patch数据还可以修改flash中对应地址的值
根据patch简介中的介绍,通过修改物理地址为0x6fe4开始的内容,也可以达到修改patch参数的目的。(例如使用flash烧录器烧录)
- patch数据框架
irom烧录流程如下:
graph TD
F(开始)-->A
A(可变参数配置) -->B(switch和gmac初始化)
B --> C(检查连接状态)
C --> |是|D(执行烧录镜像流程)
C--> |否|E(进入uboot或者没有uboot时重启)
E-->|重启|F
patch数据分为5个部分:
| 功能 | ||
|---|---|---|
| 1 | 前两条patch数据 | 储存可变的配置参数(gmac的tx/rx delay、使用指定的phy addr或scan得到phy addr、检查link的时间等) |
| 2 | 检查连接 | 通过mdio的读写读取phy的连接状态 |
| 3 | switch初始化 | 通过mdio的读写完成switch的初始化 |
| 4 | 触发初始化 | 这条配置触发3中配置的switch初始化 |
| 5 | 触发检查连接 | 这条配置触发2中配置的检查连接 |
各部分说明及注意点如下:
| 说明 | |||
|---|---|---|---|
| 1 | 前两条patch数据 | 1、可以选择phy/switch模式,选择1000Mphy模式时,irom按照通用phy的方式进行初始化,无需后续部分的patch内容 2、可配置tx/rx delay,tx/rx delay范围为0x1~0x100 3、当选择switch模式时,irom代码需要各部分patch的起始offset,其中检查连接固定为第3条,所以这里需要存放switch初始化、 触发初始化、触发检查连接的offset,offset的计算见patch简介 | |
| 2 | 检查连接 | 1、对应switch示例的第三条数据 2、可以选择mdio read或write,选择read时会从参数4的地址进行mdio read,选择write时会在参数4的地址写入参数3的数值 3、参数2为1表示该部分结束,检查连接部分由1条patch组成,配置多条的方法参见下面的switch初始化部分 | |
| 3 | switch初始化 | 1、对应switch示例的第四至第十三条参数,这些参数的含义与第三条相同。2、其中第四至第十二条的参数2为0表示该部分未结束,第十三条的参数2为1表示该部分结束。只配置单条数据的方法参见上面的检查连接部分 | |
| 4 | 触发初始化 | 这条默认配置可以触发3中配置的switch初始化 | |
| 5 | 触发检查连接 | 1、这部分会将检查连接部分中最后一次读取的数据右移(参数1的值 +2)bit后,bit0为1继续进行镜像烧录,bit0为0停止烧录。2、检查连接部分可以读switch中某个phy的连接状态决定是否继续烧录,或者使检查的bit值为1进行镜像烧录 |
通用phy参数示例与各参数说明如下:
2 1 1 5 0 0 7d0
30 40 0 0 0 0 0
| 参数1 | 参数2 | 参数3 | 参数4 | 参数5 | 参数6 | 参数7 | |
|---|---|---|---|---|---|---|---|
| 第一条参数 | 2 | 1 | 1 | 5 | 0 | 0 | 7d0 |
| 说明 | default | default | 1-选择1000Mphy模式 3-选择switch模式 | default | default | default | 7d0-检查连接时间为2000ms |
| 第二条参数 | 30 | 40 | 0 | 0 | 0 | 0 | 0 |
| 说明 | tx delay-0x30*0.04ns | rx delay-0x40*0.04ns | 1-使用给定的phy addr 0-scan获取phy addr | phy addr的值为0 | deflaut | deflaut | deflaut |
intel switch参数示例与各参数说明如下:
2 1 3 5 0 0 7d0
60 10 1 0 7038 716c 7150
0 1 0 16 1 0 0
0 0 e93c 1f 0 0 0
0 0 0 0 1 0 0
0 0 f410 1f 0 0 0
0 0 0 0 1 0 0
0 0 f410 1f 0 0 0
0 0 32a5 0 0 0 0
0 0 e943 1f 0 0 0
0 0 0 0 1 0 0
0 0 e943 1f 0 0 0
0 0 1914 0 0 0 0
0 1 0 10 5 0 0
4 1 0 10 7 0 0
参数说明:
| 参数1 | 参数2 | 参数3 | 参数4 | 参数5 | 参数6 | 参数7 | ||
|---|---|---|---|---|---|---|---|---|
| 第一条参数 | 2 | 1 | 3 | 5 | 0 | 0 | 7d0 | |
| 说明 | default | default | 1-选择1000Mphy模式 3-选择switch模式 | default | default | default | 7d0-检查连接时间为2000ms | |
| 第二条参数 | 60 | 10 | 1 | 1f | 7038 | 716c | 7150 | |
| 说明 | tx delay-0x60*0.04ns | rx delay-0x10*0.04ns | 1-使用给定的phy addr 0-scan获取phy addr | 指定phy addr的值为31 | switch初始化的offset | 触发初始化的offset | 触发检查连接的offset | |
| 第三条参数 | 0 | 1 | 1 | 16 | 1 | 0 | 0 | |
| 说明 | default | 0-该部分未结束 1-该部分结束 | mdio write写入的值 | mdio write/read的地址 | 0-mdio_write 1-mdio_read | mdio read/write执行前的delay配置,单位ms | default | |
| 第四条参数 | 0 | 0 | 1c0 | 1f | 0 | 0 | 0 | |
| 说明 | default | 0-该部分未结束 1-该部分结束 | mdio write写入的值 | mdio write/read的地址 | 0-mdio_write 1-mdio_read | mdio read/write执行前的delay配置,单位ms | default | |
| … | … | … | … | … | … | … | … | |
| 第十三条参数 | 0 | 1 | 0 | 10 | 1 | 0 | 0 | |
| 说明 | default | 0-该部分未结束 1-该部分结束 | mdio write写入的值 | mdio write/read的地址 | 0-mdio_write 1-mdio_read | mdio read/write执行前的delay配置,单位ms | default | |
| 第十四条参数 | 0 | 1 | 0 | 10 | 5 | 0 | 0 | |
| 说明 | default | default | default | default | default | default | default | 触发switch初始化部分 |
| 第十五条参数 | 4 | 1 | 0 | 10 | 7 | 0 | 0 | |
| 说明 | 读取bit的偏移量 | default | default | default | default | default | default |
irom烧录截图
pc烧录成功截图

串口烧录成功截图

3.3 uboot对接
- 对接准备
见3.1节的介绍,可以参考U-boot移植应用开发手册
- 对接流程
uboot中gmac和switch的代码存放在
uboot/drivers/net/sfa18_gmac.c
1,switch对接:
每个switch中有多个phy的接口,根据switch的说明书可以查看读写单个phy中通用phy寄存器的方法。
对接新的switch或phy,只需要在函数sf_gmac_register中增加对phy id的判断(用来区分不同的switch或phy),并且增加初始化函数(一般为设置cpu port为1000M全双工,按switch要求进行初始化)、设置tx/rx delay即可。 对应代码如下(以intel switch为例):
if(!chip_id) {
gsw_reg_rd(priv, 0xFA11, 0, 16, (unsigned int*)&chip_id);
…………
} else if (chip_id == 0x2003) {
// intel giga switch
priv->gswitch = 1;
intel_rgmii_init(priv, 5);
#if defined(CONFIG_SOC_SFA28_MPW0)
gsw_reg_wr(priv, PCDU_5_TXDLY_OFFSET,
PCDU_5_TXDLY_SHIFT,
PCDU_5_TXDLY_SIZE,
2);
}
其中:
gsw_reg_rd(priv, 0xFA11, 0, 16, (unsigned int*)&chip_id)
该函数用于读取寄存器的值,0xFA11为chip_id使用寄存器,一般在芯片手册说明。这里读取寄存器的值之后赋值给chip_id,目的是从下方的多个if函数中判断不同switch。第一次调试需要手动打印出变量chip_id取得值,然后后续才在if判断中写入。
和gsw_reg_wr函数一样,里面会调用相同函数
sgmac_mdio_write(priv->bus, intel_phy_addr, 0, SMDIO_WRADDR, ro);
其中的intel_phy_addr是switch的phy_addr,通过源码可以查看,需要自行确认调整。
intel_rgmii_init(priv, 5);
用于对rgmii的初始化,5为rgmii_port0,可从源码查找。
总体来说,uboot里面只需要提供一个读写寄存器的接口函数 和初始化rgmii接口的函数。
读写正常, rgmii初始化正常之后,调节tx/rx delay。参考对接准备中的第7点。
先调节tx delay,从0x00调到0xff,httpd给板子设定ip后,在板子上ping设定同网段静态ip的PC,在PC上抓包,直到抓到板子发出的报文,说明tx通了。
注意:若仍旧失败,可以使用switch的tx/rx delay调节方法,通过寄存器的读写函数如gsw_reg_wr,查找芯片手册对应的tx/rx对应寄存器以及对应比特位,将值设置为0,重新开始找正确的delay值。
2,phy对接:
如果读取phyid判断外接的为phy,那么phy的初始化可以按照通用流程,配置速度双工、设置软件reset等完成配置。如果这个phy有其他的初始化要求,进行相应的配置即可。
phy的初始化流程:
struct phy_device *phydev;
int mask = 0xffffffff, ret;
phydev = phy_find_by_mask(priv->bus, mask, PHY_INTERFACE_MODE_RGMII);//寻找phy设备
if (!phydev)
return -ENODEV;
phy_connect_dev(phydev, dev);//连接phy设备
phydev->supported &= PHY_GBIT_FEATURES;
if (priv->max_speed) {
ret = phy_set_supported(phydev, priv->max_speed);//设置接口速度双工
if (ret)
return ret;
}
phydev->advertising = phydev->supported;
priv->phydev = phydev;
phy_config(phydev);//设置
phy配置相关函数定义在:
uboot/drivers/net/phy/phy.c
3.4 linux对接
- 对接准备
见3.1节的介绍
- 代码结构
gmac模块和switch模块的代码分别位于
openwrt-18.06/package/kernel/sf_gmac
openwrt-18.06/package/kernel/sf_gswitch
要对接新的switch需要分别修改sf_gmac和sf_gswitch模块中的代码 sf_gmac: 加入switch的初始化函数,使能和关闭端口,配置端口的ethtool函数 sf_gswitch: 新增switch的api源代码,修改Makefile进行编译,对接vlan初始化和wan-lan划分的函数
- sf_gmac部分
- sf_gmac模块中关于switch的代码主要在sf_gmac.c中,流程如下:
graph TD
A(sgmac_probe检查switch型号) -->B(sgmac_open进行switch初始化并使能端口)
B --> C(sgmac_stop关闭端口)
sgmac_probe调用sfax8_get_gswitch_type检查phy id来确定型号(与uboot中相同),sgmac_open和sgmac_stop中配置初始化和开启关闭端口函数。在gmac模块中配置switch的初始化函数主要是为了当只加载gmac模块时,gmac数据能通,此时switch芯片没有vlan功能,只起到数据交换功能。
sgmac_open:
if (priv->phydev->phy_id == xxx){
……
priv->pesw_priv->init(priv->eswitch_pdev);
//cpu port初始化,一般配置1000M 全双工
priv->pesw_priv->pesw_api->enable_all_phy(priv->pesw_priv);
//使能phy端口
……
}
sgmac_stop:
priv->pesw_priv->pesw_api->disable_all_phy();//关闭phy端口
其中配置开启关闭端口函数,当重新配置板子的ip时,如果phy连接不断开,与之相连的pc不会改变ip。重启端口可以使得phy重新连接,从而使连接的pc重新获取ip
- ethtool部分 在sf_gmac/src/sf_eswitch_ethtool.c中,以接口形式对应。
struct ethtool_ops eswitch_ethtool_ops = {
.get_settings = gsw_get_settings,
.set_settings = gsw_set_settings,
.get_drvinfo = gsw_get_drvinfo,
.get_sset_count = gsw_get_sset_count,
.get_ethtool_stats = gsw_get_ethtool_stats,
.get_strings = gsw_get_strings,
.get_link = ethtool_op_get_link,
.nway_reset = gsw_nway_reset,
.get_ringparam = gsw_get_ringparam,
};
具体ethtool使用参考有线网络和服务介绍
- phy的对接
当gmac外接phy时,调用sfax8_get_gswitch_type检查phy id确定为phy之后,调用内核of_phy_connect和phy_disconnect即可完成通用的phy的对接。同时需要调整gmac和phy的接口模式一致。如果这个phy有其他的初始化要求,也需要进行相应的配置。
sgmac_open:
if (priv->phy_node){
……
priv->phydev = of_phy_connect(ndev, priv->phy_node, sgmac_adjust_link,
0, PHY_INTERFACE_MODE_RGMII);
……
}
sgmac_stop:
struct sgmac_priv *priv = netdev_priv(ndev);
if (priv->phy_node)
phy_disconnect(priv->phydev);
- sf_gswitch部分
以新增intel switch为例:
- 新增源码
在sf_gswitch/src/下新建文件夹intel7084_src来存放intel switch对应的api函数
- 修改Makefile
在新建文件夹intel7084_src中编写Makefile编译所需的C代码,intel_config.mk内容如下:
INC_DIR := $(intel_dir)/include //intel switch头文件所在目录
SRC_DIR := $(intel_dir)/src //intel switch C代码所在目录
SFAX8_INTEL7084_SRC_OBJS += $(SRC_DIR)/sf_intel7084_ops.o //加入需要编译的C代码对应的.o文件
ccflags-y += -I$(INC_DIR) //包括头文件
修改sf_gswitch/src/下的Makefile,包括switch文件夹下的Makefile
intel_dir=./intel7084_src
export intel_dir //将文件夹的相对路径给到子目录的Makefile
include $(SUBDIRS)/$(intel_dir)/intel_config.mk //包含子目录里switch的Makefile
SFAX8_INTEL_API_OBJS := $(SFAX8_INTEL7084_SRC_OBJS)
gswitch-y += $(SFAX8_INTEL_API_OBJS) //编译gswitch模块包含对应源码
- 对接函数
新的switch函数对接需要用到位于sf_gswitch/src/sf_gswitch.h的结构体sfax8_gswitch_api_t
struct sf_eswitch_api_t {
#ifdef CONFIG_SWCONFIG
struct switch_dev_ops *ops;
#endif
void (*vender_init)( struct sf_eswitch_priv *eswitch_priv);
void (*vender_deinit)( struct sf_eswitch_priv *eswitch_priv);
void (*led_init)( int led_mode);
void (*ifg_init)(void);
void (*enable_all_phy)(struct sf_eswitch_priv *pesw_priv);
void (*disable_all_phy)(void);
int (*check_phy_linkup)(int port);
u32 (*get_cpu_port_rx_mib)(void);
int (*set_cpu_port_self_mirror)(struct sf_eswitch_priv *pesw_priv, int port, int enable);
int (*getAsicReg)(unsigned int reg, unsigned int *pValue);
int (*setAsicReg)(unsigned int reg, unsigned int pValue);
int (*getAsicPHYReg)(unsigned int phyNo, unsigned int phyAddr, unsigned int *pRegData);
int (*setAsicPHYReg)(unsigned int phyNo, unsigned int phyAddr, unsigned int pRegData);
};
在intel7084_src/src/sf_intel7084_ops.c中完成对应函数的编写,sf_eswitch_driver.c根据chip_id来确定型号,并且选择使用对应switch的函数和相应的参数,硬件参数一般由具体的硬件型号确定
sf_intel7084_ops.c中注册函数:
struct sf_eswitch_api_t intel7084_api = {
#ifdef CONFIG_SWCONFIG
.ops = &intel7084_switch_ops,//switch设备函数㕜主要包括端口的vlan配置
#endif
.vender_init = intel7084_init,//switch初始化函数,厂商源码提供
.vender_deinit = intel7084_deinit,//switch卸载函数,设置软件reset
……
.getAsicReg = sf_intel_getAsicReg,
.setAsicReg = sf_intel_setAsicReg,
.dumpmac = intel7084_dumpmac,
};
/openwrt-18.06/package/kernel/sf_eswitch/src/sf_eswitch_driver.c中
unsigned char sf_eswitch_init_swdev函数:
intel7084_mdio_rd(0xFA11, 0, 16, &chip_id);
//和uboot里一样读chip_id,所以需要前面先调通
……
if(chip_id == INTEL7084_ID){
pesw_priv->model = INTEL7084;
pesw_priv->pesw_api = &intel7084_api;
pesw_priv->port_list = SWITCH_PORT_LIST;
#ifdef CONFIG_SWCONFIG
pswdev->ports = INTEL_SWITCH_PORT_NUM;
pswdev->cpu_port = RGMII_PORT0;
#endif
break;
}
除了.init .deinit.check_phy_linkup这3个函数,在intel7084_src/src/sf_intel7084_ops.c中结构体 switch_dev_ops中存放了配置switch vlan功能的函数,switch_dev_ops为内核提供的标准switch设备的结构体,其中的内容如下。
struct switch_dev_ops gswitch_switch_ops = {
.attr_global = {
.attr = intel7084_globals, //设置switch使能vlan功能
.n_attr = ARRAY_SIZE(intel7084_globals),
},
.attr_port = {
.attr = intel7084_port, //空
.n_attr = ARRAY_SIZE(intel7084_port),
},
.attr_vlan = {
.attr = intel7084_vlan, //设置使用的vlan id
.n_attr = ARRAY_SIZE(intel7084_vlan),
},
.get_vlan_ports = intel7084_get_vlan_ports, //获取端口tag模式,设置vlan entry
.set_vlan_ports = intel7084_set_vlan_ports, //设置端口tag模式
.get_port_pvid = intel7084_get_port_pvid, //获取switch各个端口的vlan id
.set_port_pvid = intel7084_set_port_pvid, //设置switch各个端口的vlan id
.get_port_link = intel7084_get_port_link, //查看端口连接和速度双工模式
.reset_switch = intel7084_reset_switch, //switch重置
};
.set_vlan_ports与.set_port_pvid这两个函数为配置vlan所需的主要函数,根据network文件里的配置,内核会将vlan配置的信息下发到这里,然后由这里的switch驱动对switch芯片进行相应的vlan配置。
3.5 Qos功能对接
- qos说明
qos功能主要是对不同类型的数据流提供不同优先级的服务。qos模块对接switch中支持的各种qos功能,然后用户空间可以通过qos模块注册的debug_fs节点完成相应的qos功能配置。目前qos模块可以根据数据流中dscp或pcp的值对数据进行分类,并且按照SP(Strict Priority)或WFQ(Weighted Fair Queuing)的策略对数据流进行相应的调度。
- qos对接说明
qos对接使用的结构体位于package/kernel/sf_qos/sf_qos_out.h中,目前已经拷贝到switch模块package/kernel/sf_gswitch/src/sf_qos_out.h下。以intel7084为例,代码在sf_intel7084_qos_api.c,在其中主要完成了3个结构体的初始化并使用qos模块提供的函数进行注册,实现qos功能的对接,对接函数如下。
int sf_intel7084_qos_unregister(void){
sf_qos_driver_unregister();//qos模块提供的函数
return 0;
}
int sf_intel7084_qos_register(void){
sf_qos_driver_register(&gsw_qos_driver);//qos模块提供的函数
return 0;
}
可以看到所有的功能通过结构体gsw_qos_driver进行传递,其内部结构如下:
sf_switch_qos_driver gsw_qos_driver = {
.init = sf_gsw_qos_init, //qos功能的初始化
.deinit = sf_gsw_qos_deinit, //qos功能移除
.change_algo = sf_gsw_qos_change_algo, //改变调度策略,SP/WFQ
.help = sf_gsw_help, //打印关于该switch qos功能的描述
.param = &gsw_qos_param, //储存一些参数
.list_head = &gsw_qos_dscp, //qos规则的入口
};
gsw_qos_dscp和gsw_qos_pcp为两个具体的qos功能规则,分别根据数据中的dscp或pcp设置不同的优先级并按调度策略进行调度,编写好对应函数后第一个dscp结构体挂在gsw_qos_driver中的list_head 上,后续的pcp结构体挂在dscp结构体的next上。
sf_switch_qos_common_list gsw_qos_dscp = {
.pattern_e.patt_e = SF_QOS_PATTERN_DSCP_ENABLE_BIT,//根据dscp进行分类
.action_e.act_e = SF_QOS_ACTION_SCH_ENABLE_BIT, //对分类后的数据包进行调度
.next = &gsw_qos_pcp,//下一条规则为pcp
.head_rule = NULL,//entry初始为空
.max_entry_num = 8,//最大8条entry
.status = SF_QOS_LIST_EMPTY,//初始没有entry
.enable = sf_gsw_dscp_enable,//开启该功能
.disable = sf_gsw_portcfg_disable,//关闭该功能
.set_rule = sf_gsw_qos_acl_cfg,//配置entry函数
};
sf_switch_qos_common_list gsw_qos_pcp = {
.pattern_e.patt_e = SF_QOS_PATTERN_PCP_ENABLE_BIT, //根据pcp进行分类
.action_e.act_e = SF_QOS_ACTION_SCH_ENABLE_BIT, //对分类后的数据包进行调度
.next = NULL,//下一条规则无
.head_rule = NULL,//entry初始为空
.max_entry_num = 8, //最大8条entry
.status = SF_QOS_LIST_EMPTY, //初始没有entry
.enable = sf_gsw_pcp_enable, //开启该功能
.disable = sf_gsw_portcfg_disable, //关闭该功能
.set_rule = sf_gsw_qos_acl_cfg, //配置entry函数
};
在结构体dscp和pcp中,head_rule指向qos模块配置的具体entry,整体结构如下:
graph TD
A(gsw_qos_driver) -->|list_head|B( gsw_qos_dscp )
B-->|next|C(gsw_qos_pcp)
C-->|next|D(NULL,add new list here)
B-->|head_rule|E(dscp rule list)
C-->|head_rule|F(pcp rule list)
4 测试用例
- uboot对接测试用例
uboot对接完成后,编译镜像并烧录,命令行使用httpd配置ip地址之后,pc能正常ping通视为对接成功。
- linux对接测试用例
linux对接完成后,编译镜像并烧录,wan口连接上级设备后能自动获取ip,lan口能ping通默认ip 192.168.4.1视为对接成功。
- switch的吞吐测试
测试包括普通网线下的lan-lan,host-lan,wan-lan的测试,百米网线的测试,千兆网卡的百兆模式下的测试。 具体的测试环境搭建和测试方法可以参考以太网测试介绍
- qos测试用例
qos测试通过qos模块提供的debug_fs接口进行,以intel switch为例,测试如下: 测试环境:intel switch lan口连接三个设备A、B、C,由A、B向C跑udp iperf(100M), 将intel switch与C相连的口设置为100M(A、B发包速率不到1000M),进行测试。
SP(Strict Priority)测试:
1、iptable给A的数据流配置dscp优先级,命令: iptables -A POSTROUTING -t mangle -p udp –dport 5001 -j DSCP –set-dscp 0x2A
2、使用 echo choose dscp > /sys/kernel/debug/qos_debug echo change_algo 0 > /sys/kernel/debug/qos_debug 选择dscp优先级,SP调度策略
3、echo pattern dscp 0x2a > /sys/kernel/debug/qos_debug echo action sch 2 3 > /sys/kernel/debug/qos_debug echo rule 1 > /sys/kernel/debug/qos_debug 配置dscp 0x2a到队列2,并配置规则
4、A、B跑流,由于A映射到队列2,B为默认队列0, 所以C优先收到A的数据流
WFQ(Weighted Fair Queuing)测试:
1、echo change_algo 1 > /sys/kernel/debug/qos_debug 选择调度策略WFQ
2、 echo pattern dscp 0 > /sys/kernel/debug/qos_debug echo action sch 0 3 > /sys/kernel/debug/qos_debug echo rule 1 > /sys/kernel/debug/qos_debug
echo pattern dscp 0x2a > /sys/kernel/debug/qos_debug echo action sch 2 5 > /sys/kernel/debug/qos_debug echo rule 1 > /sys/kernel/debug/qos_debug 配置dscp 0到队列0权重3(B),配置dscp 0x2a到队列2权重5(A), 跑流C收到的数据为A:B = 5:3
- 不同switch速度配置
1,设置intel7084 switch port5(RGMII口)速度双工:
1000M全双工:
echo rwReg 0xf410 0 16 0x32a5 > sys/kernel/debug/esw_debug
100M全双工:
echo rwReg 0xf410 0 16 0x2aa5 > sys/kernel/debug/esw_debug
10M全双工:
echo rwReg 0xf410 0 16 0x22a5 > sys/kernel/debug/esw_debug
2,设置siflower gmac(RGMII口)速度双工:
1000M全双工:
devmem 0x10800000 32 0x02140C8C
100M全双工:
devmem 0x10800000 32 0x0214CC8C
10M全双工:
devmem 0x10800000 32 0x02148C8C
3,设置rtk8367 switch port16(RGMII口)速度双工:
1000M全双工:
echo rwReg 0x1d11 0x7700 > sys/kernel/debug/esw_debug
echo rwReg 0x1311 0x1076 > sys/kernel/debug/esw_debug
100M全双工:
echo rwReg 0x1d11 0x7680 > sys/kernel/debug/esw_debug
echo rwReg 0x1311 0x1075 > sys/kernel/debug/esw_debug
10M全双工:
echo rwReg 0x1d11 0x7600 > sys/kernel/debug/esw_debug
echo rwReg 0x1311 0x1074 > sys/kernel/debug/esw_debug
5 FAQ
- Q:当mdio读写不通时如何处理?
A: 当出现mdio读写不通时,可以使用示波器测量gmac和phy/switch之间的时钟是否正常。
- Q:当配置初始化之后,数据tx/rx不通时如何处理?
A: 当出现数据不通时,可以调整对应的tx/rx delay,使用devmem命令调试gmac芯片中预留的tx/rx delay寄存器。
- Q:软重启网口没有link,而断电重启不会出现此现象是什么问题?
A:软重启会先down以太网接口,此时驱动会disable all phy,interface up后会重新enable all phy;如果发现uboot阶段,所有网口依旧没有link,说明uboot中没有进行switch 的hw reset(uboot阶段通过gpio触发),reset后网口会恢复默认配置;而断电重启不会有此流程,所以不会出现此现象;
需要确认uboot中CONFIG_SFA18_ESWITCH_RST_GPIO的配置, 这是一个用户可以修改的宏,表示的是switch hw reset对应的GPIO number,不同客户使用我们芯片时,硬件接的GPIO number可能是不一样的需要对照硬件改为对应的gpio_num, 即硬件switch hw reset对应的gpio为11, 则CONFIG_SFA18_ESWITCH_RST_GPIO 需要配置为11
文档信息
- 本文作者:Phoenix
- 本文链接:https://siflower.github.io/2020/09/11/new_switch_import_guide/
- 版权声明:自由转载-非商用-非衍生-保持署名(创意共享3.0许可证)