SPI驱动开发手册
目录
1. 介绍
本文主要介绍Siflower的SPI驱动的流程
1.1. 适用人员
开发人员应该具备以下技能:
- 熟悉C语言
- 熟悉Linux Device Driver开发
1.2. 开发环境
- 可以正常编译通过的Siflower SDK环境 该环境的搭建请参考快速入门
2. SPI介绍
SPI是串行外设接口(Serial Peripheral Interface)的缩写。SPI,是一种高速,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间提供方便,正是出于这种简单易用的特性,如今越来越多的芯片集成了这种通信协议
SPI协议是一种同步串行通信协议,主要用于短距离通信。SPI设备在全双工模式下通信,并且是Master-slave 模式,一个master可以有一个或多个slave。Master组织帧格式,并且可通过slave select线控制所选slave。所用的4根线分别记为data in( DI ) / data out( DO ) / slave select ( SS )/ clock( CLK )。
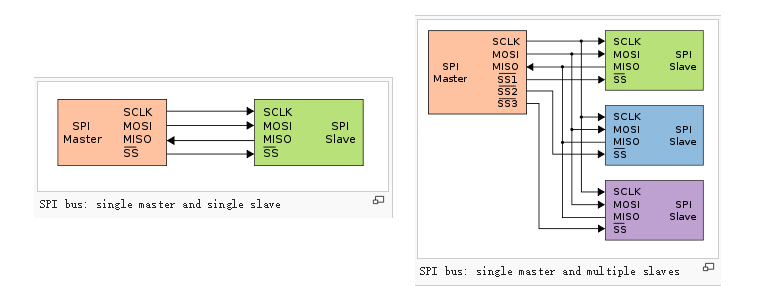
图 1 SPI bus can operate with a single master device and with one or more slave devices
SPI总线定义了四个逻辑信号:
- SCLK:时钟信号,由master输出
- MOSI:主发从收(Master Output, Slave Input),由master输出
- MISO:从发主收(Master Input, Slave Output),由slave输出
- SS:slave选择(active low),由master输出
2.1. Operation
如果只有一个slave,可以把SS pin电平固定为logic low(如果slave允许这么做。有些slave会要求一个/CS(chip select)信号的下降沿来触发指令)。大部分slave设备在未被master选中的时候MISO会处于高阻抗的状态(逻辑上就是未连接),也成为第三状态,没有第三状态的设备就不能与其他slave设备共用SPI总线。
2.2. Data Transmission
数据开始传输之前,master必须先设置clock信号,然后用SS 线上的逻辑0来选中slave设备。在每个时钟周期内,数据传输都是全双工的。Master送1bit数据到MOSI线上,slave读到这个数据,与此同时slave也发送了1bit数据到MISO线上,master也读到了一个数据。通常情况下,这可以通过两个移位寄存器来实现。
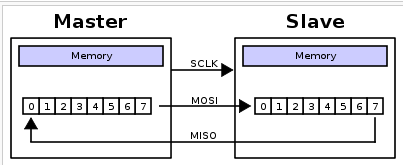
图 2 A typical hardware setup using two shift registers to form an inter-chip circular buffer
如图2所示,两个移位寄存器在逻辑上连成一个环,每个移位寄存器的高位与另一个的低位相连,这样每次数据的最高有效位(MSB)被发送出去,新接收到的数据放在最低有效位(LSB),当寄存器的数据发送完成后,master和slave就交换了各自寄存器中的数据。然后重复这一过程,就实现了主从之间的数据通信。
2.3. Clock polarity and phase
Clock polarity (CPOL)表示clock的idle state是0还是1, CPOL=0表示clock的idle state为0,active state为1,CPOL=1时相反。
Clock phase (CPHA)表示在clock的第几个边沿采集数据(一个时钟周期可以看成是idle->active->idle, 所以有两个边沿),CPHA=0表示在clock的idle state->active state边沿,即第一个边沿采集数据,CPHA=1表示在第二个边沿采集数据。
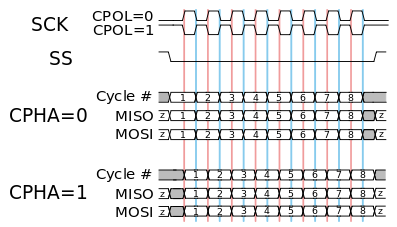
图 3 A timing diagram showing clock polarity and phase. The red vertical line represents CPHA=0 and the blue vertical line represents CPHA=1
CPOL和CPHA相互组合可组成4种不同的模式,mode可记为(CPOL,CPHA),这样(0,0)、(0,1)、(1,0)、(1,1)分别表示mode 0~3。
2.4. Three Data Formats
目前所使用的芯片支持三种数据格式:Motorola SPI, Texas Instruments SSP, 和 National Microwire。
2.4.1. Motorola’s SPI Format:
- Single transfer:对 mode 0 和 mode 3来说, 数据在上升沿采样, 在下降沿送出, mode 1和2 与之相反
- Back-to-Back transfer: transmit-only/full-duplex when transmit-FIFO is not empty before the completion of the last character’s transfer or receive-only
2.4.2. TI Format
每帧数据传输之前SSI_CE拉高一个CLK周期,然后master和slave在CLK上升沿发送数据,下降沿采集数据。数据可MSB在前或LSB在前。传输完成后DT在接下来的idle期间保持送出的最后1bit数值
2.4.3. Microwire Format
两种格式format 1和2。
- Format 1: master和slave都在CLK下降沿发送数据,上升沿采集数据。
- Format 2: master 在下降沿采集和发送数据,slave在上升沿采集和发送数据。
3. SSP
3.1. Overview
SF19A2890有3个独立的同步串行接口(SSP)。SSP是一个用于同步串行通信,支持Motorola SPI, Microwire 和TI三种数据格式的master或slave接口。数据输入输出时会各自先进入一个缓冲区,每个缓冲区最多可存放64个16 bit的数据。数据通过SSPTXD输出SSP,通过SSPRXD输入SSP。Clock prescaler 模块可以对时钟频率进行调节。我们通常也直接称之为SPI。
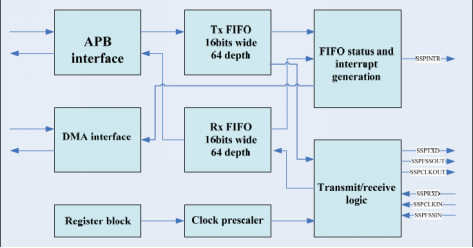
图 4:SSP block diagram
3.2. Data Transmit and Receive
在数据开始传输或接收之前,需要对SSP进行初始化配置,设定master/slave、data size、CPOL&PHA、frame format和clock rate,SSP CR1的第0位还会设置是否为LOOP back mode。为了确保数据的正确性,还要先把TX_FIFO和RX_FIFO清空。
从CPU/DMA发过来的数据通过APB接口,缓存到Tx FIFO中,然后由Transmit logic发送出去;从外部发过来的数据通过receive logic缓存到Rx FIFO中,然后由CPU/DMA通过APB接口读出。CPU往SSP发送或读取数据可通过对SSPDR进行写/读操作来进行。
SSP_enable是打开SSP接口,SSP开始把Tx FIFO中的数据往外发,同时把数据接收到Rx FIFO中。当帧格式为TI时,主设备在发送完一帧数据的最后一位时,不会对移位寄存器进行清空,这样主设备在连续发送数据的时候,接收到的数据会产生错误,因此应先往FIFO里存好数据再enable SSP Operation。数据收发完后,再disable SSP Operation或reset,为下次数据传输准备。
4. SPI 驱动工作流程
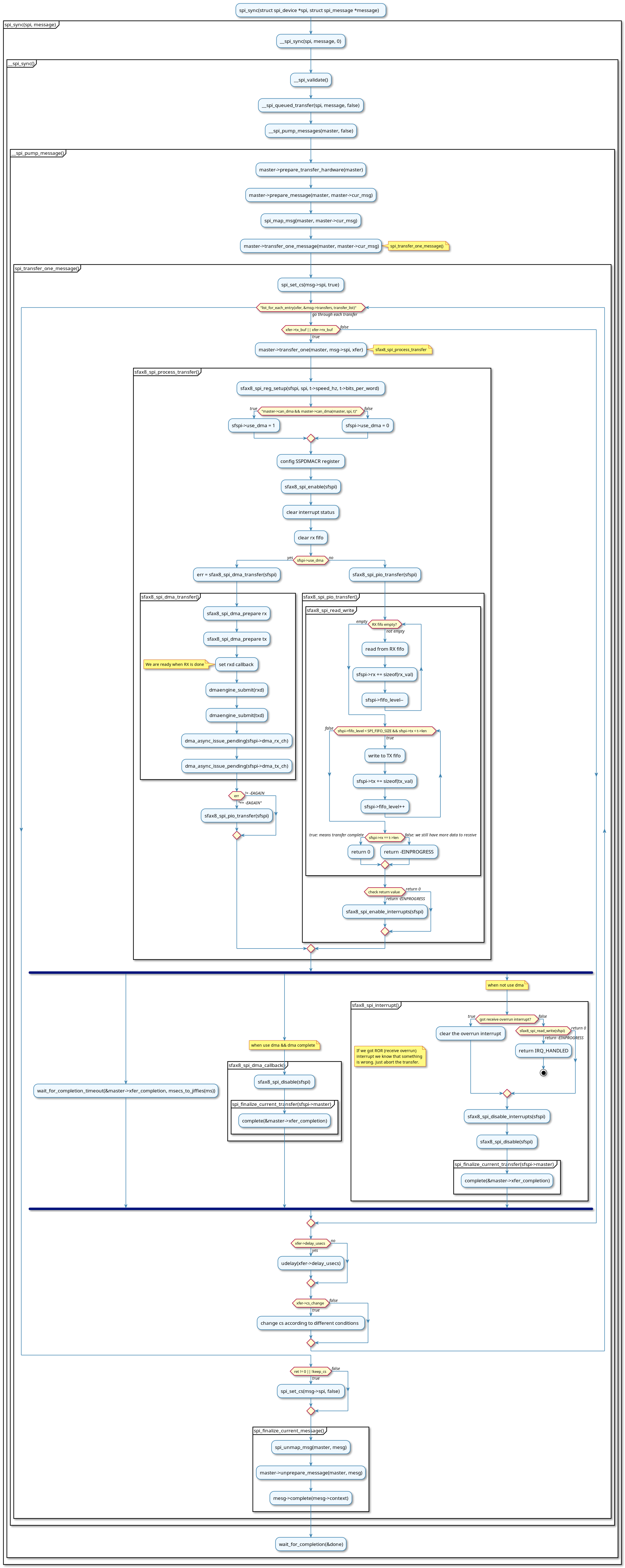
spi驱动模块对外的主要接口是spi_sync()函数,还有一个函数spi_write_then_read()在flash驱动中使用的比较多,也可以用来了解spi_sync()的主要使用方法。
该函数的主要工作流程如下图所示:
5. FAQ
5.1. DATA_REG和Rx / Tx FIFO之间的关系是什么?
DATA_REG就像停车场的入口一样,当您向DATA_REG写入数据时,数据由其他控制逻辑自动发送到Tx_FIFO,当您从DATA_REG读取数据时,Rx_FIFO将智能发送数据。 这个实现隐藏了如何控制fifos的细节,因此我们可以通过DATA_REG轻松使用fifos。
5.2. SSP控制寄存器1中SSE的功能是什么?
它是SPI和其他外围设备之间的大门。 当它关闭(SSE禁用)时,SPI和外围设备之间不能传输数据。 一旦SSE使能,发送逻辑就开始从Tx FIFO传输数据,直到Tx_FIFO为空。 因此,在启用SSP操作之前,我们必须设置时钟/数据大小和其他必要参数。
5.3. 全双工的重要性是什么?
数据传输由主时钟控制,每当主设备发送数据时,它也接收数据。 如果master想要从外围设备接收数据,它必须发送一些东西来接收。 因此,当SPI与norflash连接时,我们必须小心使用Rx FIFO(它肯定会收到一些无用的数据)。
5.4. 如何清除slave的Tx FIFO?
我们无法直接清除slave的Tx FIFO。 整个传输由主机控制,从机只能在主机发送时发送数据。 但是Tx FIFO的默认值是空的,所以在正常情况下它不是问题。
文档信息
- 本文作者:Phoenix
- 本文链接:https://siflower.github.io/2020/09/03/spi_driver/
- 版权声明:自由转载-非商用-非衍生-保持署名(创意共享3.0许可证)